BootStechnik

„Boote einmal theoretisch betrachtet“ (Autor: Knut-Michael Buchalle) ist zunächst als online Buch erschienen und inzwischen als pdf download (15 MB) erhältlich. In einer gedruckten Version gab es das Buch nicht.
Neben diesem Buch gibt es hier noch zwei weitere Grundlagenthemen die von mir in einfacher Weise als Sonderkapitel beschrieben wurden:
Hydrodynamik
Das Schiff fährt durch das Wasser. Dabei unterscheidet sich das Schiff erheblich von Flugzeugen oder Autos, denn das Schiff fährt an der Grenzschicht zwischen den Medien Luft und Wasser.
Hydrostatik / Schwimmfähigkeit
Die Grundlagen dafür warum ein Schiff schwimmt und ab wann es kentert.
Allen Gerüchten zum Trotz konnte das von den Schiffbauern auch schon genau berechnet werden, als es noch keine Computer gab.
Hydrodynamik
Wie schnell kann ein Schiff fahren? (von Knut-Michael Buchalle)
Für jedermann ist es möglich die Höchstgeschwindigkeit eines Autos direkt mit dessen Motorleistung in Verbindung zu setzen. Je mehr PS bzw. KW unter der Haube umso schneller fährt es.
Experten sehen dann noch ein paar kleine Unterschiede. Ein kleines, flaches und leichtes Auto erreicht mit 100 PS eine etwas höhere Endgeschwindigkeit als ein großes, hohes und schweres Auto.
Es ist schon etwas länger her, dass in Autoprospekten regelmäßig ein Beiwert für den Luftwiderstand, der cw Wert angegeben wurde. Diese Angabe wurde für Werbezwecke benutzt und jedem war klar, wenn er klein ist, dann ist es gut. Es war jedoch nicht jedermann bewusst, dass es sich dabei um einen dimensionslosen Beiwert, oder anders ausgedrückt um einen Gütegrad der von vorn angeströmten Karosserie handelte, der alleine noch nicht die Aussage zur Höchstgeschwindigkeit oder zum Energieverbrauch ermöglicht. Die zuerst genannten Attribute, klein, flach, leicht gehören halt ebenfalls zur Bewertung des Autos dazu. So können zwei Fahrzeuge mit gleichem cw Wert am Ende jedes eine andere Höchstgeschwindigkeit erreichen.
Übertragen auf Schiffe verhält es sich ähnlich. Wie schnell ein Schiff mit einer bestimmten Motorleistung fahren kann hängt von vielen Faktoren ab. Hier wären es Länge, Breite, Tiefgang und Gewicht. Hinzu kommt, dass ein Schiff im Wasser fährt, genauer gesagt, an der Grenzschicht zwischen Wasser und Luft.
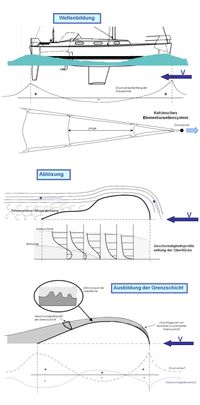
Damit unterscheidet sich die Strömungslehre bei Schiffen doch sehr von der Lehre bei Autos und Flugzeugen. Schiffe erzeugen eine gut sichtbare Oberflächenwelle die im Allgemeinen als Bug- und Heckwelle bezeichnet werden.
Das mit einer konstanten Geschwindigkeit fahrende Schiff befindet sich im Gleichgewichtszustand, d.h. die von der Antriebsmaschine erzeugte Leistung entspricht dem Widerstand des Rumpfes bei seiner Fahrt durchs Wasser.
Wie setzt sich der Widerstand des Rumpfes nun zusammen? – Der Luftwiderstand, der oberhalb der Wasserfläche vorhanden ist, wird bei langsamen Schiffen üblicherweise vernachlässigt. Die Dichte von Luft beträgt 1,25 kg/m³, die von Wasser 1000 kg/dm³.
Konzentrieren wir uns also auf die Abläufe die zwischen Rumpf und Wasser passieren.
Der Rumpf bewegt sich mit einer Geschwindigkeit durch das stehende Wasser. Ähnlich wie bei einem Gegenstand den ich über den Tisch ziehe ist zunächst eine Reibung zwischen Rumpfoberfläche und dem Wasser vorhanden.
Wasser und Reibung? – Was bei einem festen Stoff wie der Tischoberfläche noch leicht verständlich ist, ist für den Laien bei einem flüssigen Medium etwas schwieriger nachzuvollziehen. So werden Flüssigkeiten zwar als Schmierung zwischen zwei festen Stoffen eingesetzt, aber dienen damit nur zur Reduzierung der Reibung. Es besteht also auch zwischen Flüssigkeiten und festen Stoffen eine wenn auch geringe Reibung, die damit einen Teil des Rumpfwiderstandes ausmacht.
Die Ausbildung der Bug- und Heckwellen zeigt, dass es noch weitere Widerstandsanteile geben muss. Die Wellenbildung ist ein Indiz für eine Veränderung des Wasserdrucks entlang der Rumpfoberfläche. Am Bug steigt der Druck an, fällt entlang der Schiffsseite wieder ab, um am Heck des Schiffes wieder anzusteigen. Neben der Höhe der Druckveränderungen ist hier noch die Länge der Druckberge und Täler von Interesse.
Die Wellenbildung wurde von William Froude (1810 – 1879) näher untersucht. Er definierte die Froudezahl, die noch bis heute sehr gut den Fahrtzustand eines Schiffes beschreibt.
Die Froudezahl ergibt sich aus der wellenbildenden Länge und der Schiffsgeschwindigkeit. Der Zustand der Rumpfgeschwindigkeit wird bei einer Froudezahl von 0,4 erreicht. Rumpfgeschwindigkeit bedeutet für ein sogenanntes Verdrängerfahrzeug die Höchstgeschwindigkeit. Gemäß dieser Definition erreicht z.b. ein 36 m Schiff bei der Froudezahl 0,4 eine Geschwindigkeit von 14 kn, wenn die Motorleistung dafür ausreichen würde.
Die erforderliche Motorleistung ergibt sich aus der Widerstandskraft des Schiffsrumpfes bei einer bestimmten Geschwindigkeit. Die Leistung ist die Multiplikation aus Kraft und Geschwindigkeit unter Berücksichtigung der Wirkungsgrade. Da die Motorleistung über einen Propeller in Vortriebskraft umgesetzt wird, sind hier noch eine ganze Reihe von Teilgrößen zu berücksichtigen, die aber am Ende in einem Gesamtgütegrad der Propulsion zu einem Faktor zusammengefasst werden. Zur Erfüllung der Gleichgewichtsbedingung bei einer konstanten Geschwindigkeit ist, wie schon gesagt, die Vortriebskraft gleich groß zur Widerstandskraft. Bei einer Motorleistung von 540 PS und einer Geschwindigkeit von 12 kn hat das 36 m Beispielschiff bei einem geschätzten Propulsionsgütegrad von 0,75 einen Rumpfwiderstand von 85,79 kN.
Wenn die mögliche Rumpfgeschwindigkeit von 14 kn erreicht werden soll, wäre dann überschlägig eine Motorleistung von 640 PS erforderlich.
Diese Leistungsprognose war jetzt stark vereinfacht, denn die Zunahme des Rumpfwiderstandes findet nicht linear zum Anstieg der Schiffsgeschwindigkeit statt. Erschwerend kommt hinzu, dass mit zunehmender Schiffsgeschwindigkeit der Wirkungsgrad des Propellers schlechter wird.
Die exakte Ermittlung des Rumpfwiderstandes und der damit erforderlichen Motorleistung ist also ein gutes Stück Arbeit, besonders wenn man noch die Einflussgrößen bei der Propulsion hinzunimmt. Die verschiedenen Widerstandsteilgrößen des Rumpfes und die Umsetzung der Motorleistung in Vortriebskraft müssen untersucht werden. Dies lässt sich mit statistisch-empirischen Prognoseverfahren, Modellversuchen oder modernen CFD Verfahren machen. Dabei hat jedes Verfahren seine Grenzen der Zuverlässigkeit.
Sehr viel aufwendiger werden die Betrachtungen bei schnellen Schiffen, die den Zustand des teilweisen Gleitens (Froudezahl 0,4 bis 1,0) und den Zustand des reinen Gleitens (Froudezahl >1) erreichen. Also einen Zustand wo das Schiff über seine eigene Bugwelle hinweg fährt. Hier gibt es sehr viel mehr nennenswerte Teilgrößen für den Rumpfwiderstand und auch der Windwiderstand des Überwasserschiffs kann hier wieder eine beachtenswerte Größe annehmen.
Die mögliche Endgeschwindigkeit eines Schiffes allein in Bezug zu seiner Motorleistung zu setzen, so wie es gern bei Autos gemacht wird, ist nicht möglich. Erst die ganzheitliche Betrachtung aller Parameter liefert hier eine verlässliche Aussage. Es ist also ein Gebiet für Fachleute.
Dem interessierten Laien bleibt die Möglichkeit eine erste Abschätzung mit Hilfe der Froudezahl zu machen.
Schwimmfähigkeit
Warum ein eisernes Schiff aufrecht schwimmt (von Knut-Michael Buchalle)
Die Grundlage warum ein Körper im Wasser schwimmt hat Archimedes bereits ca. 250 v. Chr. herausgefunden. Es gilt unverändert die Erkenntnis, dass ein Körper so viel Wassermasse verdrängt wie sein Gewicht ausmacht. Das allein reicht aber noch nicht. Eisen hat eine hohe Dichte, und wirft man einen Klotz ins Wasser, verdrängt er zwar sein Gewicht, aber er schwimmt nicht. Erst wenn das Volumen des Eisens größer wird und damit das verdrängte Wasservolumen mindestens dem Materialgewicht des Eisens entspricht,- am liebsten aber etwas mehr -, dann schwimmt auch Eisen. In der Praxis sieht es dann so aus, dass das Eisen zu Blechen geformt wird, mit denen dann ein mit Luft gefüllter Raum umbaut wird. Doch Vorsicht, auch dabei gilt es einige Regeln zu beachten damit das eiserne Schiff am Ende ordentlich schwimmt.
Fredrik Henrik Chapman war 1764 der erste, der die Grundlagen für ein sicher, aufrecht schwimmendes Schiff in seinem Buch Architectura Navalis Mercatoria zusammenfasste. Der schwimmende Körper, ob nun aus Eisen oder einem anderen Baumaterial, muss einige physikalische Grundlagen erfüllen, sonst hält er sich nicht aufrecht. Die Breite des Körpers, der Tiefgang, die Freibordhöhe, die Gewichtsverteilung und in einem geringeren Maß auch die Länge des Körpers sind für den sicheren Zustand des schwimmenden Schiffes ausschlaggebend.
Die physikalischen Größen wirken dabei jeweils in festen Richtungen. Es sind also Vektorkräfte. Da der eiserne Rumpf aus verschiedenen anderen Gründen keine einfache, rechteckige Form hat, wird das eingetauchte Volumen, das aufgrund der Gleichgewichtsbedingung ja dem Gewicht beziehungsweise dem Auftrieb entsprechen muss, mit einer Integralrechnung ermittelt. Zu dem aus der Rumpfgeometrie ermittelten Auftrieb gehört ein Schwerpunkt der bezogen auf die Achsen des Schiffes eine feste Lage hat. Die Schwerpunkts Lage ist ebenfalls ein Ergebnis der Integralrechnung, bei der in Form einer Momenten Rechnung das Ergebnis für den Gesamtschwerpunkt ermittelt wird. Die Auftriebswerte für den Volumenkörper sind somit bestimmt.
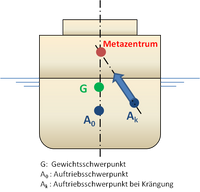
Die Werte für das Gewicht des Schiffes können im Vorfeld ebenfalls über Berechnungsverfahren bestimmt werden. Das Schiffsgewicht wird damit auch auf einen Punkt bezogen (G und A). Bezüglich der Gleichgewichtsbedingungen muss das Gewicht (G) in Größe und Lage dem Auftrieb (A) entsprechen, - jedoch mit einer Ausnahme. Es ist die Höhenlage dieser Schwerpunkte, die nicht gleich sein muss, ja sogar nicht gleich sein sollte. In der Differenz der Höhenlage von Auftrieb (A) und Gewicht (G) liegt ein wesentliches Kriterium für die Sicherheit des Schiffes.
Beim Schiffsentwurf werden die Bedingungen zur gleichen Position des Auftriebs- und Gewichtsschwerpunktes durchaus in mehreren Iterrationsschleifen für verschiedene Zustände des fahrenden Schiffes ermittelt.
Im Schiffsbetrieb stellt sich der Gleichgewichtszustand zwischen Gewicht und Auftrieb automatisch ein. Der nicht mathematisch begeisterte Leser wird jetzt aufatmen. Gott sei Dank – ich brauche nicht zu rechnen. Leider ist der sich selbst einstellende Zustand nicht immer sicher und es kommt zu einer plötzlichen Kenterung. Also sollte der vorhandene Zustand im Schiffsbetrieb mit den Rechenergebnissen verglichen werden.
Wenn ein Schiff krängt, wandert der Auftriebsschwerpunkt seitlich aus, während der Gewichtsschwerpunkt an seiner Position fest bleibt. Der Schnittpunkt der Wirklinie der Auftriebskraft mit der Symmetrieachse des Spant Querschnittes ist das Metazentrum. Sozusagen der Drehpunkt des Pendels. Solange der Gewichtsschwerpunkt unterhalb des Metazentrums liegt, ist der Zustand stabil und damit sicher. Das Metazentrum ist dabei leider kein fest liegender Punkt, sondern ändert seine Lage mit den Krängungswinkeln, weil sich die Wirkrichtung der Auftriebskraft verändert.
Insgesamt lassen sich zum Thema Schwimmfähigkeit und Stabilität noch viele Aspekte schildern, aber im Kern war es das erstmal.